


LICENZA A PORTATA DI MANO
Devi utilizzare il software per un periodo di tempo limitato?
Acquista la licenza temporanea sul nostro store online!
")
")
![]()
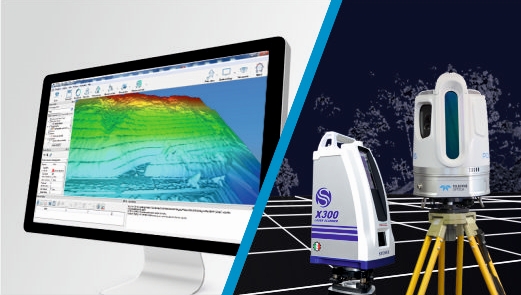
IL POTENTE SOFTWARE DI ELABORAZIONE DATI LIDAR
Software multisensore e multirisoluzione utilizzato in tutto il mondo per gestire nuvole di punti 3D e immagini provenienti da diverse piattaforme lidar e di imaging.
Caratteristiche principali:

Importazione di dati non strutturati anche di sensori differenti, nuvole di punti 3D, mesh e modelli CAD.
Filtraggio avanzato, allineamento automatico con ICP e bundle adjustment, georeferenziazione.
Mesh, texture alta risoluzione, DTM, estrazione informazioni, esportazione in CAD e in altri software di modellazione.

Il software per importare, elaborare e gestire dati LiDAR da sensori laser scanners.
Acquista la licenza temporanea sul nostro store online!









Le case produttrici Geomax, Stonex e Teledyne-Opetch hanno scelto la tecnologia Reconstructor per i loro clienti. Gli utilizzatori di questi sensori laser scanner possono infatti lavorare con versioni Reconstructor completamente dedicate ai propri strumenti di rilevamento.
La stessa tecnologia a prezzi molto convenienti!
Per università, accademie, laboratori, scuole pubbliche e private.
Approfitta subito di Reconstructor Educational!
Cercavamo un software slegato dal tipo di tecnologia laser scanner utilizzata e che potesse supportare e combinare diversi formati di file. Decisivo per la scelta è stata la stabilità del software nell'utilizzo di una grande mole di dati.

Grazie a Reconstructor ho potuto completare con grande accuratezza e qualità un importante rilievo laser scanner, particolare per caratteristiche e dimensioni.

Utilizzando la tecnologia LineUp abbiamo potuto allineare più di 500 scansioni statiche con rapidità ed accuratezza.

La tecnologia dei software Gexcel, sviluppata da esperti del settore, è alla base di prodotti davvero versatili e capaci di garantire un’esperienza di elaborazione molto soddisfacente.

I software Reconstructor e PointR³ sono risultati particolarmente efficaci per la realizzazione di ortoimmagini ad alta definizione. Li utilizziamo dal 2013 con brillanti risultati in varie tipologie di progetto.

Grazie a Reconstructor è stato possibile avere una valutazione 3D d'insieme in breve tempo. Raccomando questo software perchè è qualcosa che può veramente semplificare la vita.

Il motore di elaborazione della nuvola di punti di Reconstructor può essere utilizzato per migliorare le prestazioni dell'intera elaborazione dei dati provenienti da laser scanner, fornendo un ambiente software familiare e soddisfando molteplici esigenze.

Trovo estremamente utile l'estrazione delle curve di livello! Grazie a questa funzione è possibile estrarre in modo automatico dalla nuvola di punti 3D, i contorni come polilinee esportabili poi in formato .DXF

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
E. Questo indirizzo email è protetto dagli spambots. È necessario abilitare JavaScript per vederlo. | T. (+39) 030 6595001






CONTATTACI








